
Albert Mosella-Montoro, Ph.D
I am a Research Scientist specialized in the intersection of Computer Vision and Graphics, currently collaborating as a Research Scientist at the Human Sensing Lab, Carnegie Mellon University. I earned my Ph.D. in Deep Learning from the Universitat Politècnica de Catalunya. Previously, I worked at Epic Games, where I developed neural networks to facilitate and accelerate the design and animation of 3D characters, which have been widely adopted in the video game industry. Prior to that, I served as a Computer Vision Engineer at Ficosa, where I implemented and integrated computer vision algorithms for advanced driving assistance systems such as machine vision and digital mirror systems, collaborating with major car manufacturers.
News
- [2026.02.27] Our paper CGHair: Compact Gaussian Hair Reconstruction with Card Clustering was accepted at CVPR 2026.
- [2026.02.15] Our paper PRISM: Periodic Representation with multIscale and Similarity graph Modelling for enhanced crystal structure property prediction was published in npj Computational Materials.
- [2025.12.05] Our paper From Blurry to Believable: Enhancing Low-quality Talking Heads with 3D Generative Priors was accepted at 3DV 2026.
- [2025.04.18] Our paper Echoes of the Coliseum: Towards 3D Live streaming of Sports Events was accepted at SIGGRAPH 2025.
- [2025.01.29] Our paper A cartesian encoding graph neural network for crystal structure property prediction: application to thermal ellipsoid estimation was published in Digital Discovery.
- [2024.07.01] Our paper Generalizable Human Gaussians for Sparse View Synthesis was accepted at ECCV 2024.
- [2024.01.15] I joined the Human Sensing Lab at Carnegie Mellon University as a remote Research Scientist.
- [2023.02.14] I defended my Ph.D thesis, titled Graph Convolutional Neural Networks for 3D Data Analysis. Committe: Aljosa Smolic, Ferran Marqués, Gloria Haro. Grade: Cum Laude. Slides.
- [2022.03.02] Our paper SkinningNet: Two-Stream Graph Convolutional Neural Network for Skinning Prediction of Synthetic Characters was accepted in CVPR 2022.
- [2021.06.14] I started to work as a Research Scientist at Epic Games.
- [2021.05.08] Our paper 2D–3D Geometric Fusion network using Multi-Neighbourhood Graph Convolution for RGB-D indoor scene classification was accepted in the Information Fusion Magazine.
- [2019.08.31] Our paper Residual Attention Graph Convolutional Network for Geometric 3D Scene Classification was accepted in ICCV-W Geometry meets Deep Learning Workshop 2019.
- [2018.05.01] I started a Ph.D in Deep Learning at Universitat Politècnica de Catalunya. Advisor: Javier Ruiz-Hidalgo.
Publications
CGHair: Compact Gaussian Hair Reconstruction with Card ClusteringH. Luo, S. Sarkar, A. Mosella-Montoro, F. Vicente Carrasco, F. De la Torre IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026 |  |
From Blurry to Believable: Enhancing Low-quality Talking Heads with 3D Generative PriorsD-J. Huang, Y. Wang, S-J. Yuan, A. Mosella-Montoro, F. Vicente Carrasco, C. Zhang, F. De la Torre International Conference on 3D Vision (3DV) 2026 | 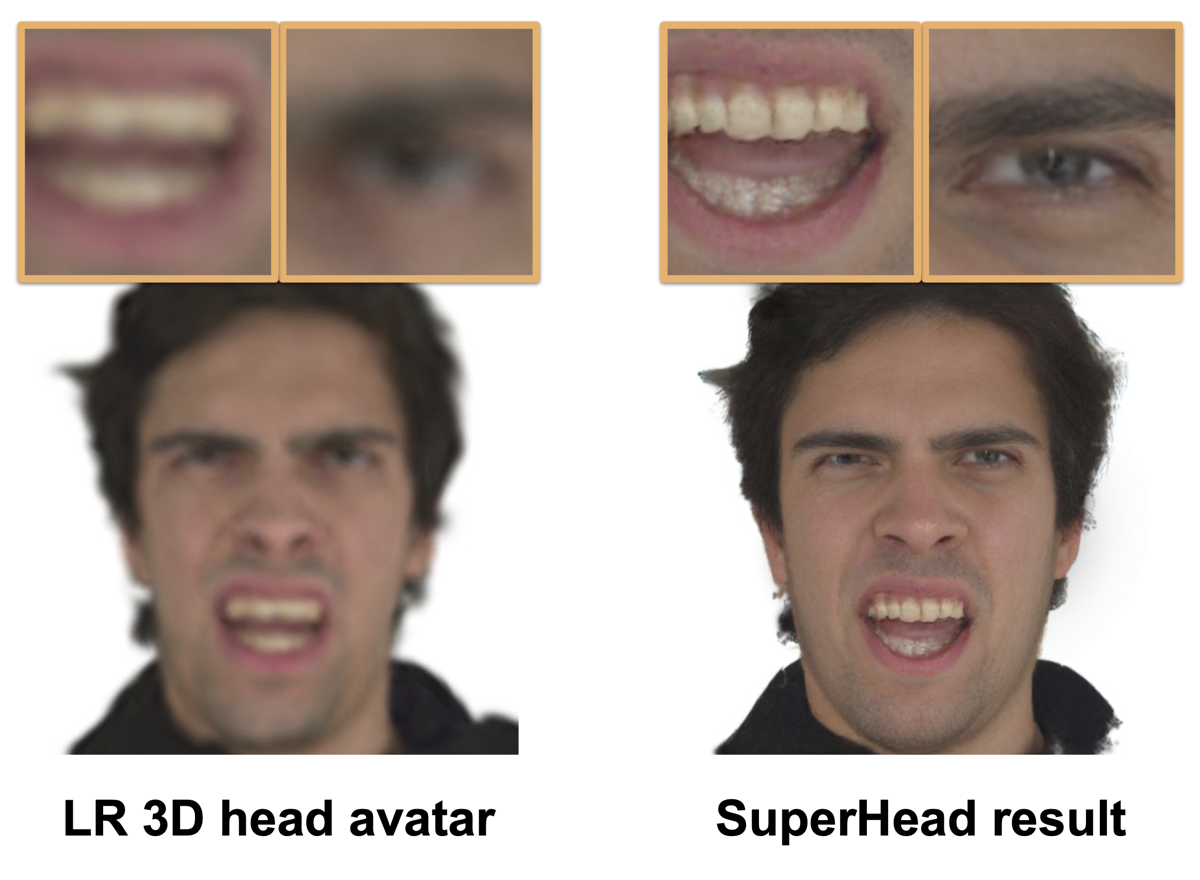 |
PRISM: Periodic Representation with multIscale and Similarity graph Modelling for enhanced crystal structure property predictionÀ. Solé, A. Mosella-Montoro, J. Cardona, D. Aravena, S. Gómez-Coca, E. Ruiz, J. Ruiz-Hidalgo | 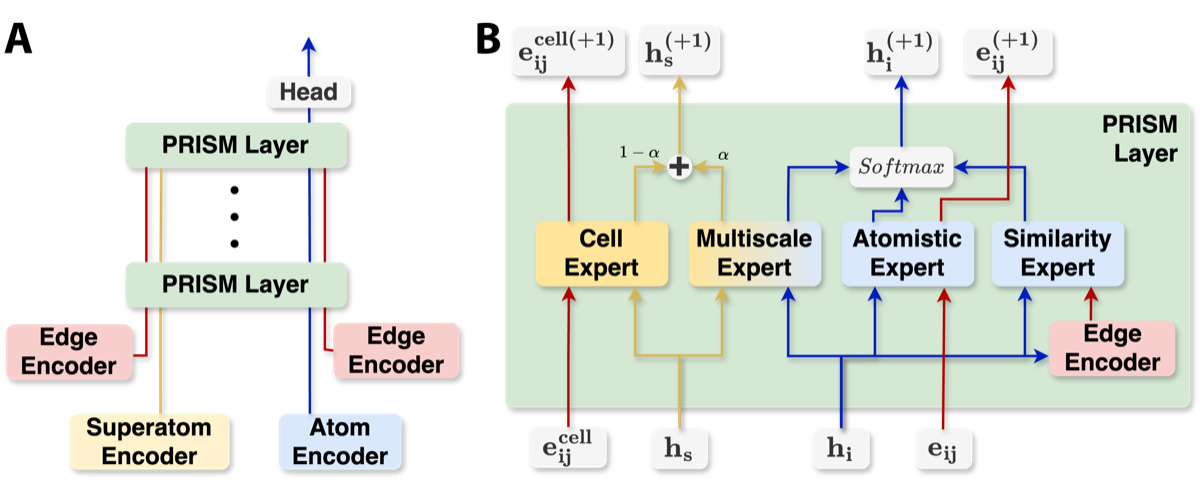 |
Echoes of the Coliseum: Towards 3D Live streaming of Sports EventsS. Subhajyoti Mallick, J. Huang, A. Amat, M. Ruiz Olle, A. Mosella-Montoro, B. Kerbl, F. Vicente Carrasco, F. De la Torre ACM Transactions on Graphics (SIGGRAPH) 2025 |  |
A cartesian encoding graph neural network for crystal structure property prediction: application to thermal ellipsoid estimationÀ. Solé, A. Mosella-Montoro, J. Cardona, S. Gómez-Coca, D. Aravena, E. Ruiz, J. Ruiz-Hidalgo | 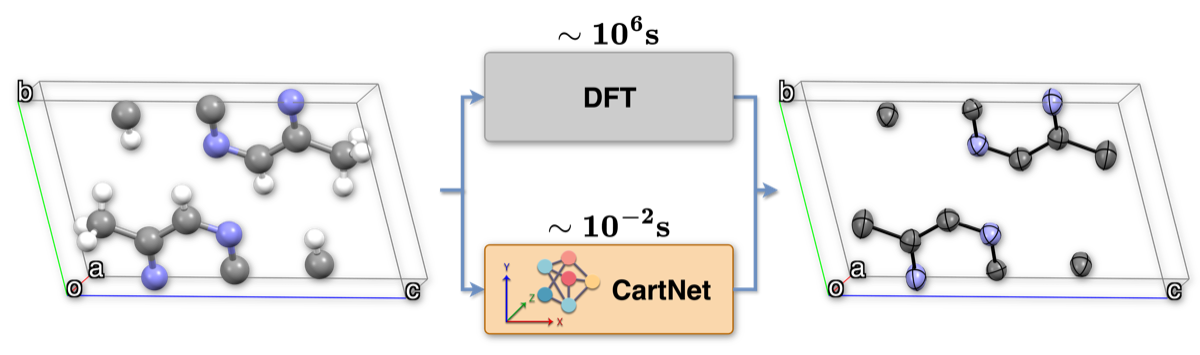 |
Generalizable Human Gaussians for Sparse View SynthesisY. Kwon, B. Fang, Y. Lu, H. Dong, C. Zhang, F. Vicente Carrasco, A. Mosella-Montoro, J. Xu, S. Takagi, D. Kim, A. Prakash, F. De la Torre European Conference on Computer Vision (ECCV) 2024 |  |
SkinningNet: Two-Stream Graph Convolutional Neural Network for Skinning Prediction of Synthetic CharactersA. Mosella-Montoro, J. Ruiz-Hidalgo IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2022 |  |
2D–3D Geometric Fusion network using Multi-Neighbourhood Graph Convolution for RGB-D indoor scene classificationA. Mosella-Montoro, J. Ruiz-Hidalgo | 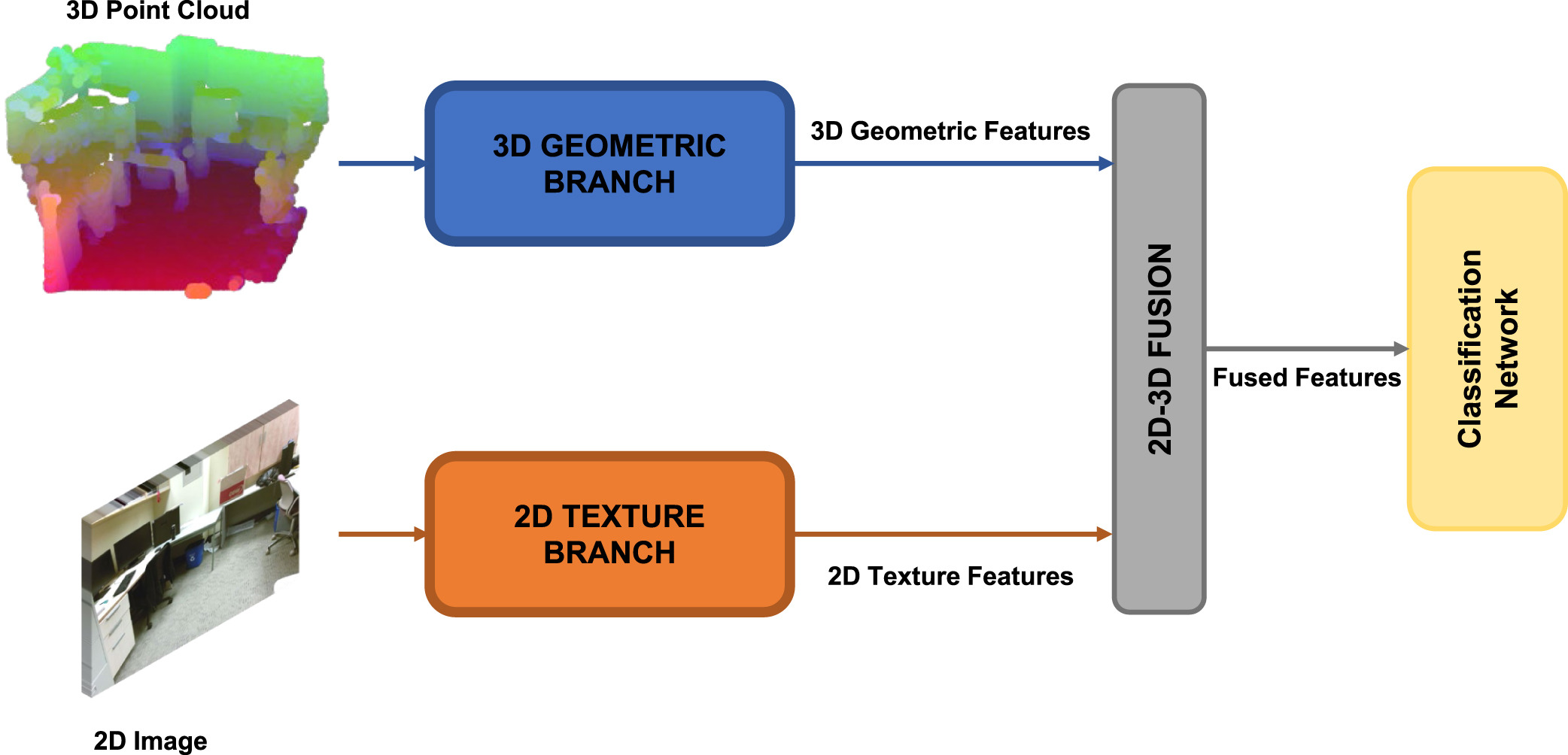 |
Residual Attention Graph Convolutional Network for Geometric 3D Scene ClassificationA. Mosella-Montoro, J. Ruiz-Hidalgo IEEE Conference on Computer Vision Workshop (ICCVW) 2019 |  |